How to Select Which Robot Type to Use Robotc
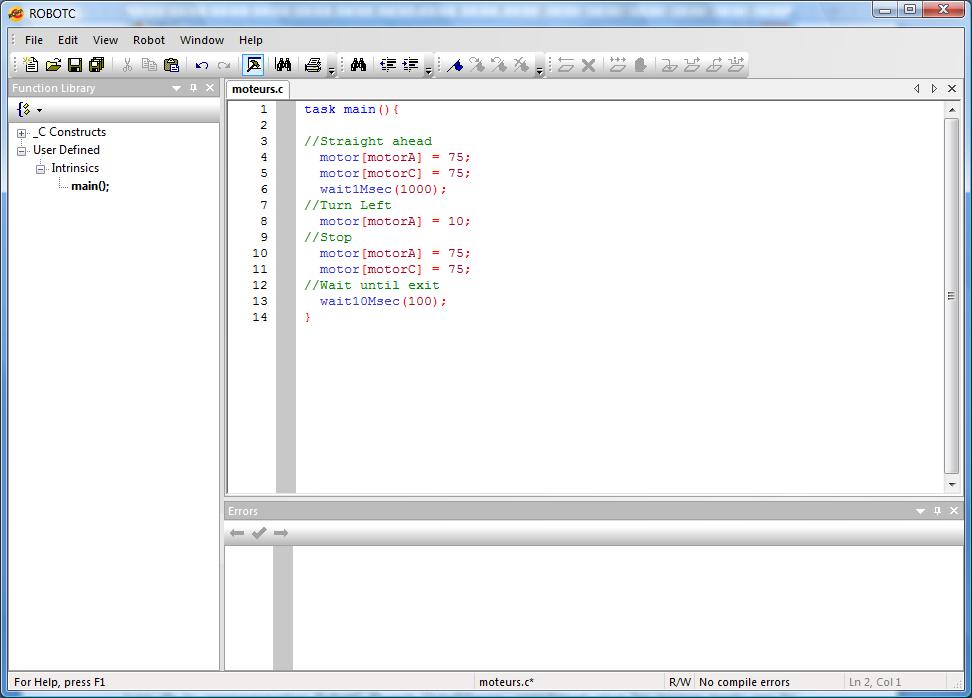
Note that not including this command defaults to robotTypenone Also please note that this command should be the first thing in your task main. Comments are text that the program ignores.

Https Www Behance Net Gallery 20854395 Apdata Robot Robot Cartoon Robot Art Futuristic Robot
Once you get your robot built you will want to begin playing with it.

. Robot Type Choose which robot you want to write a program for. Go to Robot Platform Type Innovation First IFI and select VEX 20 Cortex or Natural Language VEX Cortex. Open up ROBOTC Graphical by double clicking on the ROBOTC Graphical icon.
The following buttons are the portion of the GUI that will help you navigate and familiarize yourself with the RobotC programming environment. Select Robot -Platform Type from the menu bar and select VEX 20 Cortex 3. Technically RobotC cant either but it has the ability to make it seem like its multitasking using things called.
Is the correct Platform Type selected. A comment can contain notes messages and symbols that may help a human but would be meaningless to the robot. Next select a Virtual World to use by going to the Window menu select a Virtual World in the Select Virtual World to use menu option.
Start RobotC and Select File-New to start a new program. Select the NXT brick click Select via BT then click Close. Save the Program as lastname_lab_01c.
Click and drag code to the programming area. How do you use the Robotc virtual world. Enter a name for the motor andor sensor beside the correct port number.
Select Robot-Motors and Sensors Setup 2011 Mr. Set up ROBOTC by going to Robot Platform Type VEX IQ. You must manually set.
ROBOTC simply skips over them. Robot Type Choose which robot you are using Recbot or Swervebot. Set up ROBOTC by going to Robot Compiler Target Virtual Worlds.
In this manner what programming language does vex robotics use. Next select a Virtual World to use by going to the Window menu select a Virtual World in the Select Virtual World to use menu option. 2 Set up ROBOTC by going to Robot Platform Type VEX IQ.
Select Robot -Motors and Sensors Setup. You should choose VEX 20 Cortex if you plan on programming using the standard ROBOTC language. 2010 Carnegie Mellon Robotics Academy For use with LEGO MINDSTORMS Education NXT software and base set 9797 ROBOTC Natural Language - NXT Quick Reference 1 Robot Type Choose which robot you are using.
Start RobotC and Select File-New File to create a blank program. Launch ROBOTC from your Desktop icon or Start Menu Go to the Robot menu and make sure that the Compiler Target is set to Virtual Worlds instead of Physical Robot. Select Robot-Platform Type from the menu bar and select NXTTetrix.
Next select a Virtual World to use by going to the Window menu select a Virtual World in the Select Virtual World to use menu option. Launch ROBOTC from your Desktop icon or Start Menu Go to the Robot menu and make sure that the Compiler Target is set to Virtual Worlds instead of Physical Robot. PLTW platform type is selected.
Select Robot then Compile Program. Launch ROBOTC from your Desktop icon or Start Menu Go to the Robot menu and make sure that the Compiler Target is set to Virtual Worlds instead of Physical Robot. 1 Open up ROBOTC Graphical by double clicking on the ROBOTC Graphical icon.
Select Robot then Compile Program. Select the Natural Language PLTW option if there is no check mark. Select Robot then Platform Type.
This sensor data can then be used for accurate control of the robot. Build your robot correctly ROBOTCs Graphical Language expects to see the standard build with the left motor connected to port1 and the right motor connected to port6. Launch ROBOTC from your Desktop icon or Start Menu Go to the Robot menu and make sure that the Compiler Target is set to Virtual Worlds instead of Physical Robot.
Specify that you are using the Cortex and how it is connected to your computer in ROBOTC. 3 Set up ROBOTC by going to Robot Compiler Target Virtual Worlds. To select the program type click on the Robot tab VEX IQ Controller Mode and select the appropriate program type.
RobotCs faux-multitasking is handled by the task scheduler. With a robot however the ability to store sensor values values that are measured by the robot rather than set by the programmer adds invaluable new capabilities. Comments appear in green in ROBOTC.
When mounted on the rotating shaft of a moving portion of the robot such as an arm or gripper the Potentiometer provides precise feedback regarding its angular position. First connect via USB select the NXT brick from the top left and click Select via BT instead of. In the Type drop-down select what type of motor or sensor you are using.
You will have many tabs to choose from to setup the motor ports navigate to the Motors tab for Analog Sensors navigate to the VEX 20 Analog Sensors 1-8 tab etc. Verify that the correct platform type is selected by selecting Robot then Platform Type. This snippet of code will set the robot type to none by default skipping the setup process.
I include here text from the aweseome jpearman about how RobotCs tasks work because I couldnt possibly say it better myself. ROBOTC Natural Language - NXT Quick Reference. Writing a Function s for driveStraight and driveTime with RobotC.
You should now be able to select the NXT brick from the middle left Bluetooth list. RobotC has two menu driven tools to accomplish this configuration. It is possible to program using ROBOTC Graphical Language with other motor configurations.
The Potentiometer can be attached to the robot using the mounting arcs surrounding the center of the sensor. ROBOTC allows comments to be made for this purpose. 4 Click New File.
It gives the robot the ability to take measurements in one place and deliver them in another or even do its own calculations using stored values. Start Motor Set a specific motor to a speed. Next select a Virtual World to use by going to the Window menu select a Virtual World in the Select Virtual World to use menu option.

Pin By Jeana Parker On Robotics Teaching Robotics Educational Robots Instructional Technology

Robotc Curriculum For Tetrix And Lego Mindstorms Http Www Education Rec Ri Cmu Edu Previews Robot C Pro Lego Mindstorms Teaching Robotics Educational Robots

Thames Kosmos Robotics Workshop Kit Robotics Workshop Robotics Engineering Robotic Toys

Deep Learning Robot Robot Operating System Deep Learning Robot

Robotc Net Home Of The Best Robot Programming Language For Educational Robotics Made For Nxt Programming And Vex Pr Robot Programming Vex Robotics Fun Stem

Robotic Arm Diy With Foamcore For Arduino Pdf Templates For Printing Robot Arm Robotic Arm Diy Arduino

Robotc Net Forums View Topic Questions About Vex 2 0 Cortex And Virtual Worlds

Robot C Riccardo Zema Https Www Behance Net Gallery Stylized Robots Mixed Updated 2109 4947511 Robot Art Retro Robot Robot

Introduction To Robotc Robolink

Robot Virtual Worlds Maze Crawler Virtual World Virtual Finite State Machine
Introduction To Programming Nxt Robots In C With Robotc

Hexbug Vex Iq Robotics Construction Kit Robotic Toys Robot Programing Software

Premium Vector Hand Drawn Colorful Robots Collection How To Draw Hands Vector Free Robot
Click To Buy Original Box Transformation 4 Car Robot Toys Pvc Action Figure Brinquedos Car Robot C Classic Toys Toys For Boys Transformers Action Figures
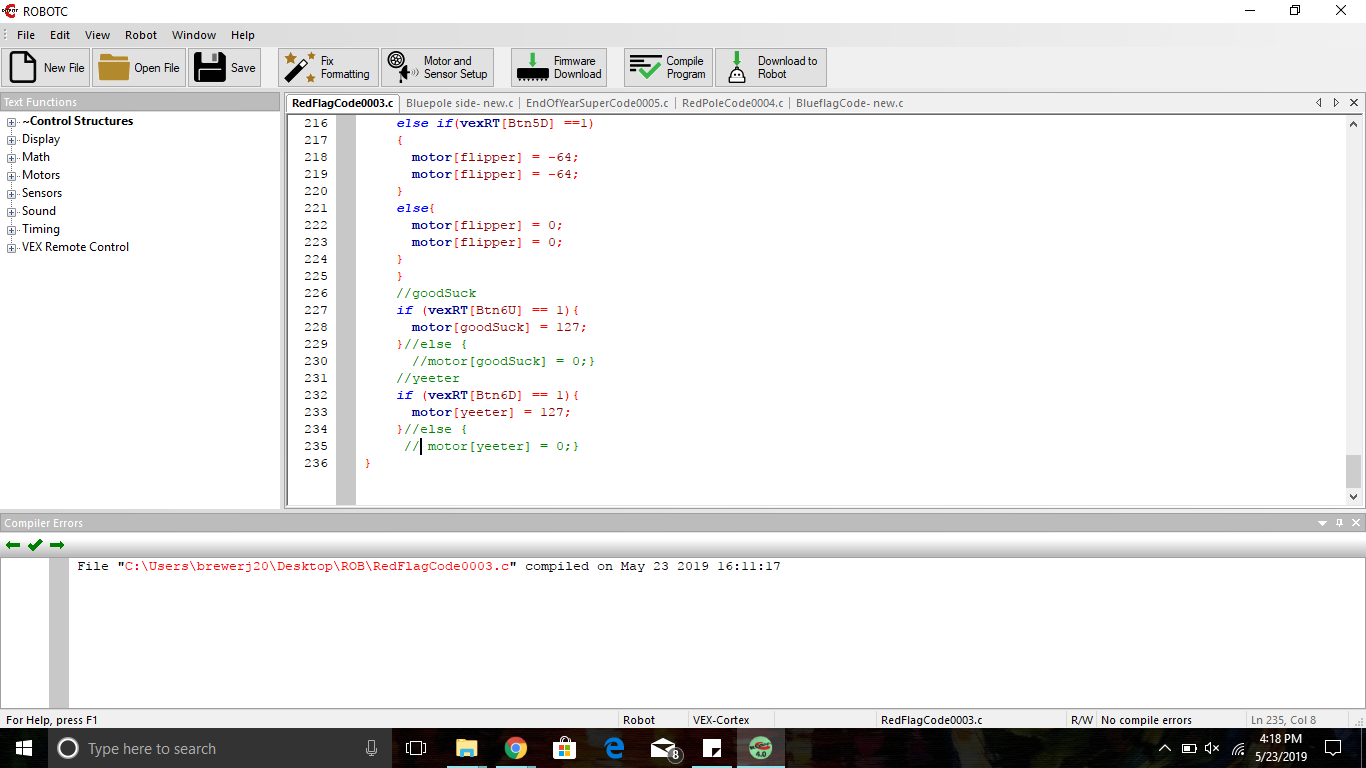
Robot C Code Help Robotc Tech Support Vex Forum

Best Tech Toys Reward Emblem Toys Logo Identity Design Logo Tech Toys

Middle School Educational Robots Introduction To Programming Vex Robotics
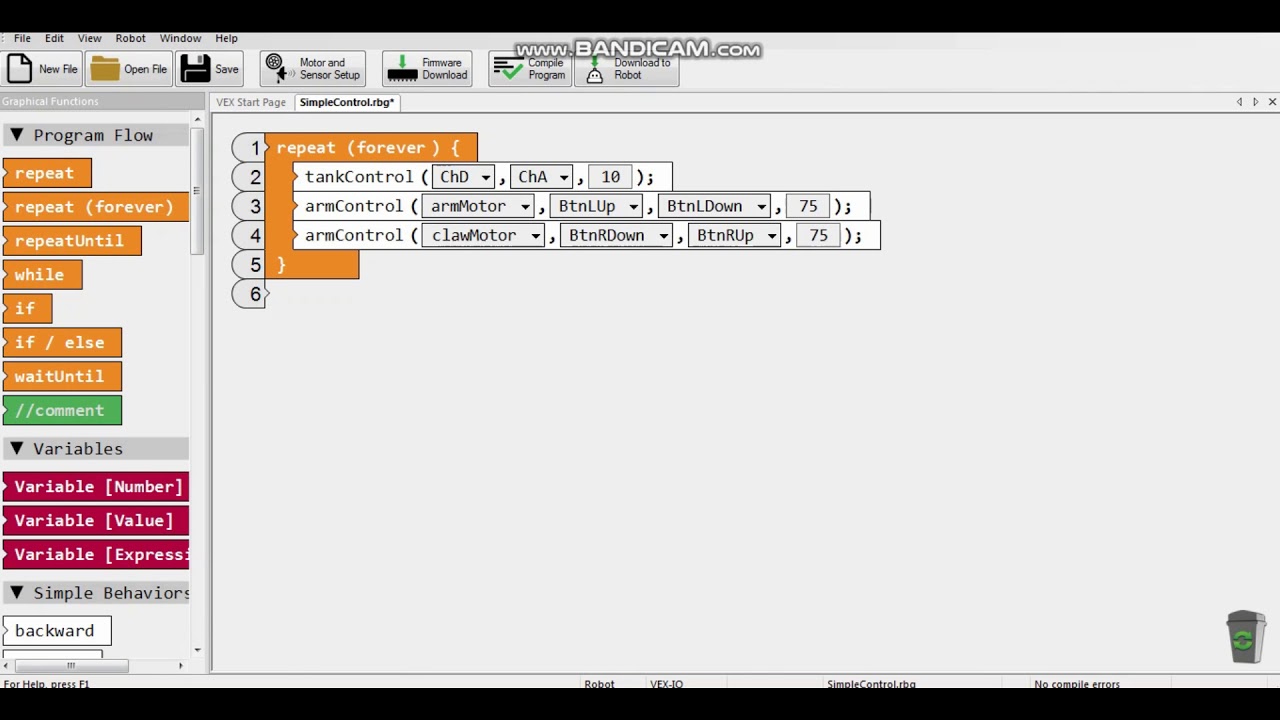
Vex Iq 101 Introduction To Robotc Graphical Robotics Competition Introduction Graphic

Vex Robotc 4 X 02 Setup Motors And Wait Command Youtube



Comments
Post a Comment